***Pour revenir à la page d’accueil** ICI
Janvier 2018
Nouvelle version à base d’Arduino.
Programmable sur tout PC, pour un cout total de l’electronique inferieur à 10€, cette nouvelle version ne presente que des avantages comparée à la precedente à base de Pic.
Le système de 3 sondes ayant fait ses preuves depuis 4 ans de fonctionnement, il est conservé.

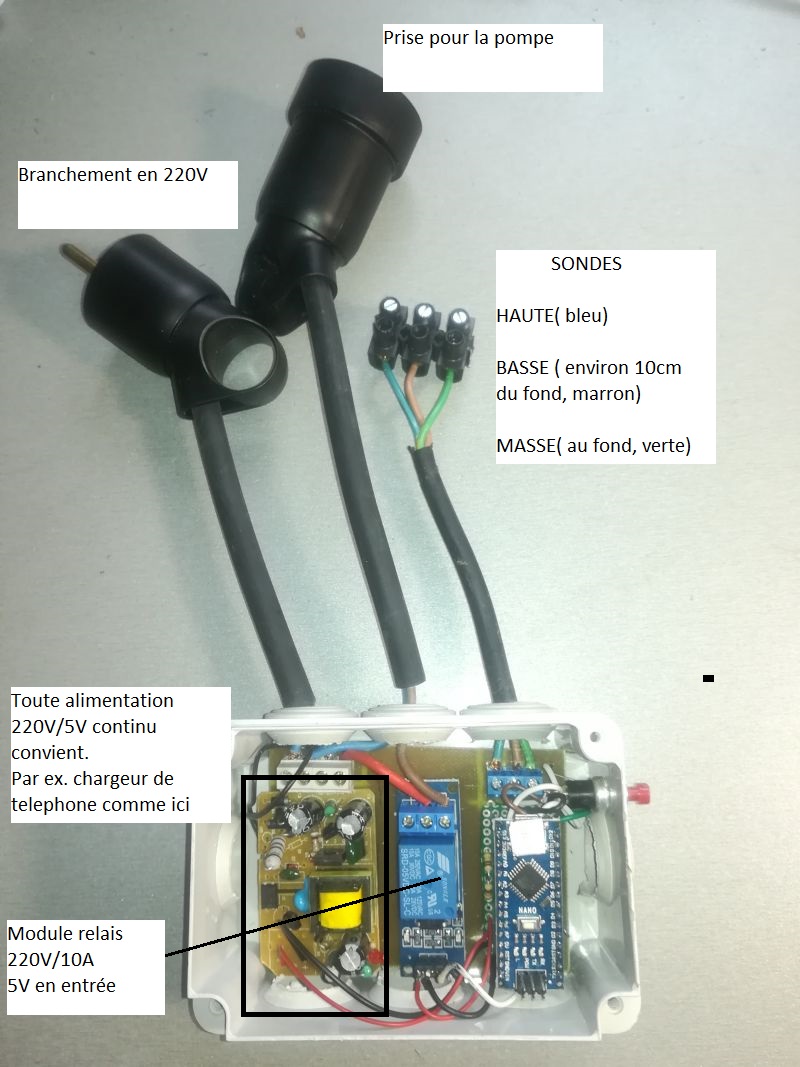
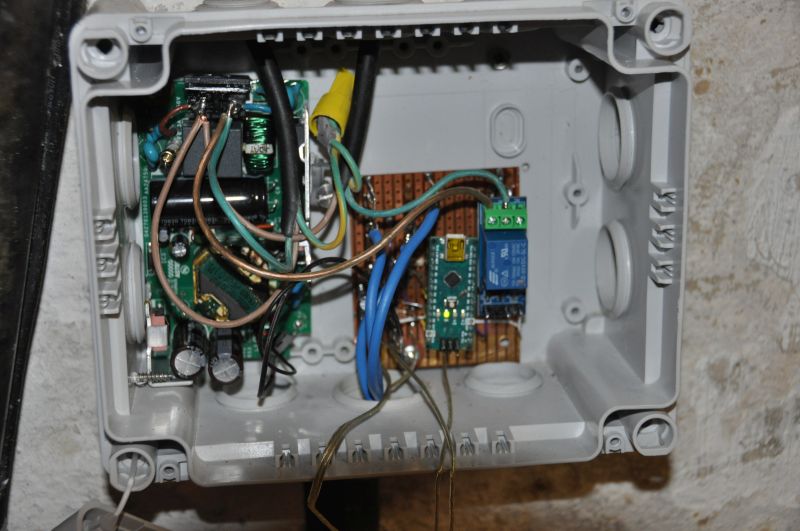
Avec une alimentation récupérée d’un ancien téléphone portable, un module de relais adaptable directement sur une broche de l’Arduino, cette commande de pompe immergée est très simple à réaliser pour un coût vraiment modique.

Rudimentaire, il comporte environ 20 lignes.
|
Logiciel Pompe_Duino_240118
Logiciel Pompe_Duino_240118
|
La séquence de fonctionnement est la suivante :
 Attente
de 10 s après mise sous tension, le temps que les deux condensateurs se
chargent.
Attente
de 10 s après mise sous tension, le temps que les deux condensateurs se
chargent.
Tant que l’électrode Haute n’est pas
noyée, la pompe est arrêtée.
Quand le niveau d’eau atteint cette
électrode, la pompe est activée et le reste jusqu’au moment où le
niveau d’eau descend sous l’électrode du BAS : elle s’arrête alors.
L’eau dans le tuyau au dessus de la pompe va redescendre et noyer de nouveau l’électrode basse mais ceci est ignoré par l’électronique qui attend l’immersion de l’électrode haute pour redémarrer.
Cette fonction retard entre les niveau haut et bas s’appelle l’hystérésis du système.
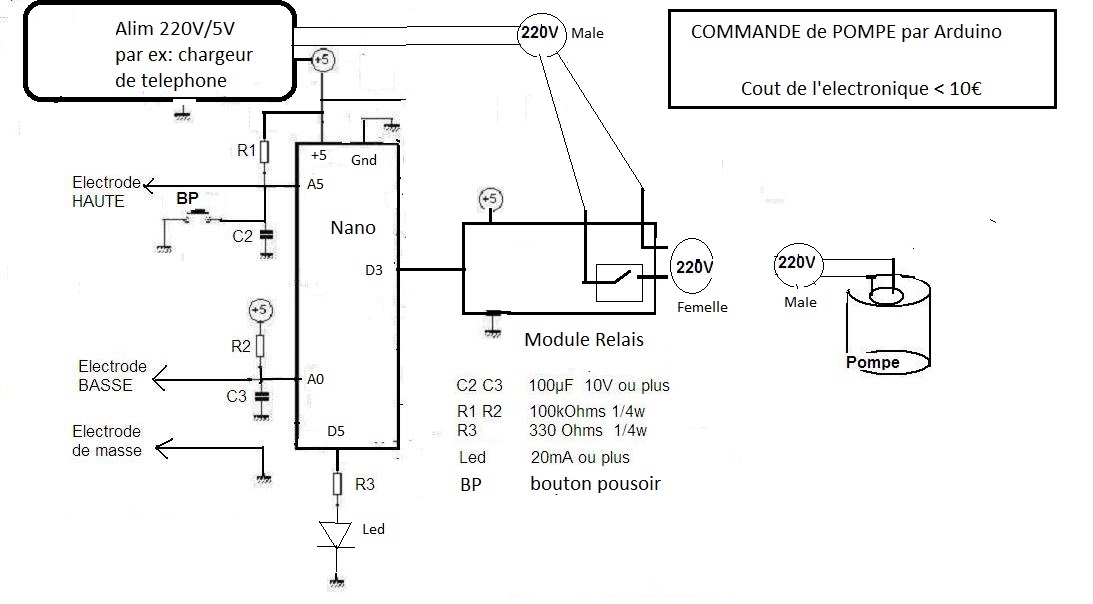
L’ Arduino scrute en permanence les
deux entrées Haut et Bas : une électrode à l’air libre donne une
entrée à 5V, via R1 ou R2. Dès que l’eau atteint une électrode, la
résistance de l’eau est très faible par rapport à R1 ou R2 (100 000
Ohms), donc l’entrée passe à quasi 0 volt.
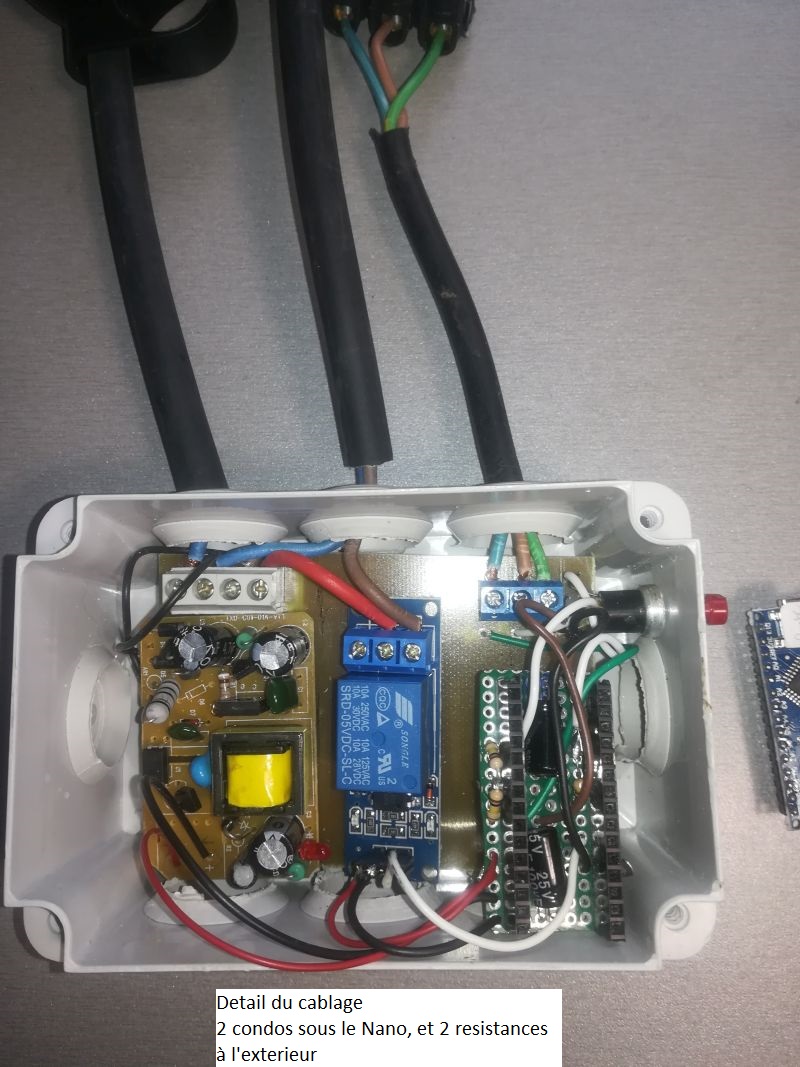
La commande de la pompe se fait via le
module relais : le 220V est totalement isolé de la partie
electronique via un opto-coupleur : l’Arduino
commande l’allumage de sa Led interne qui commande optiquement la
conduction d’un transistor interne aussi, alimentant la bobine du
relais.
Module : par exemple, sur Amazon :
XCSOURCE 5PCS 5V 1 Canal Relais Module Bouclier Optocoupleur Pour PIC AVR DSP ARM Arduino TE213
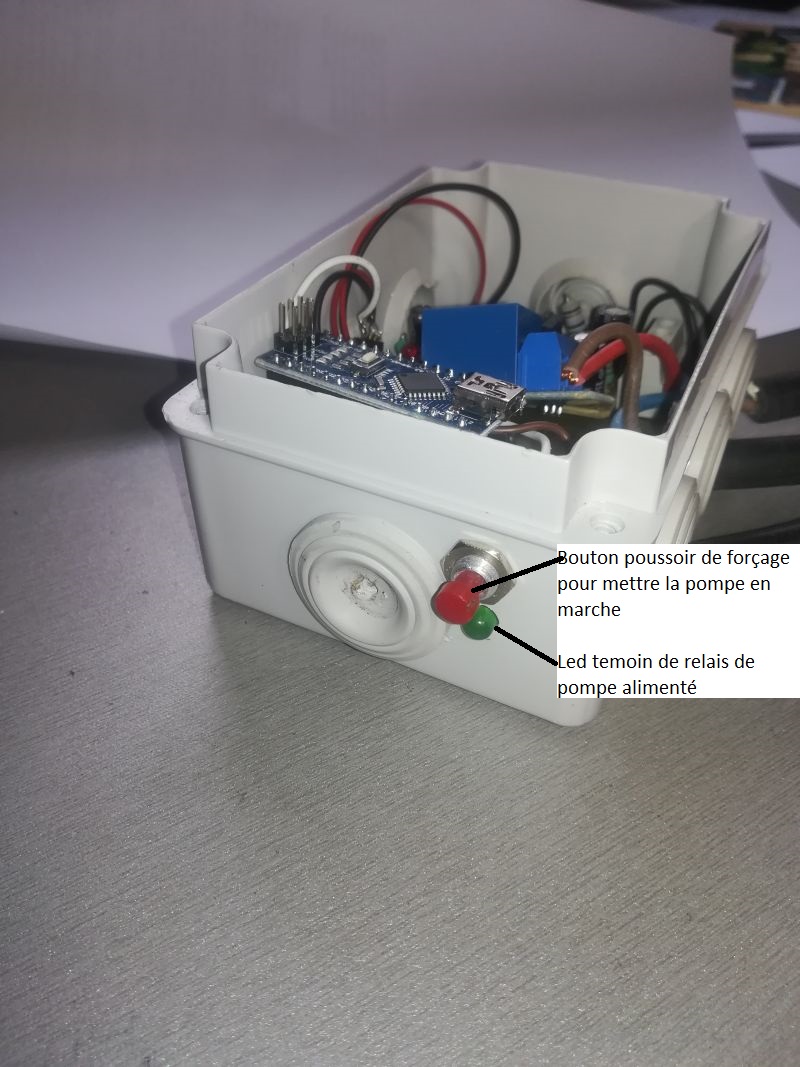
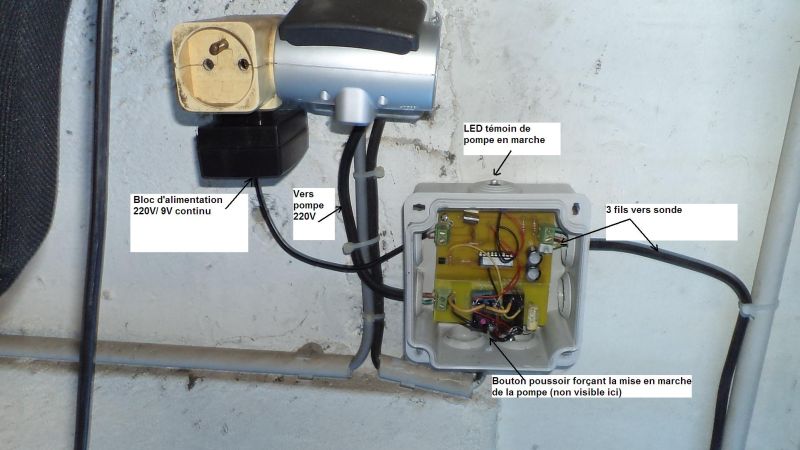
Le Bouton Poussoir sert à forcer la
mise en marche de la pompe pour vérifier son fonctionnement par exemple.
Version du 11 novembre 2013, avec modification du câblage du Pic et nouveau logiciel.
Pour remplacer la commande de mise en marche/arrêt par flotteur, tombée en panne, voici une commande purement électronique, sans partie mobile.
Cette pompe immergée, aussi appelée "vide-cave", (800W) possède un flotteur dont l’axe de rotation commande l’interrupteur de mise en marche et d’arrêt automatiques.
Au fil des temps l’interrupteur interne s’est détérioré avec comme conséquence la pompe restant en marche continue bien que le flotteur soit retombé.
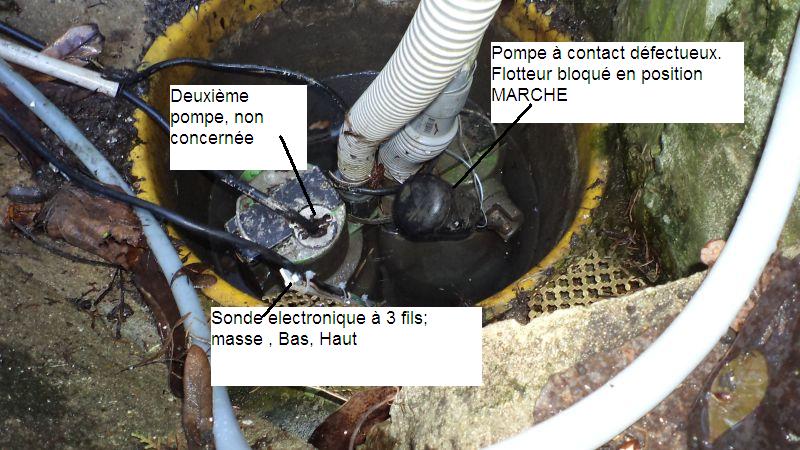
Le choix existait entre le démontage de l’engin pour une tentative de réparation avec le risque certain de problèmes d’étanchéité au remontage !!!J’ai donc opté pour une solution électronique en priorité, une intervention sur la pompe restant toujours possible en cas d’échec de cette première tentative.
Le flotteur est bloqué en position haute en permanence, le rôle de l’électronique est de commander un relais qui ferme ou ouvre un des fils du 220V alimentant la pompe.
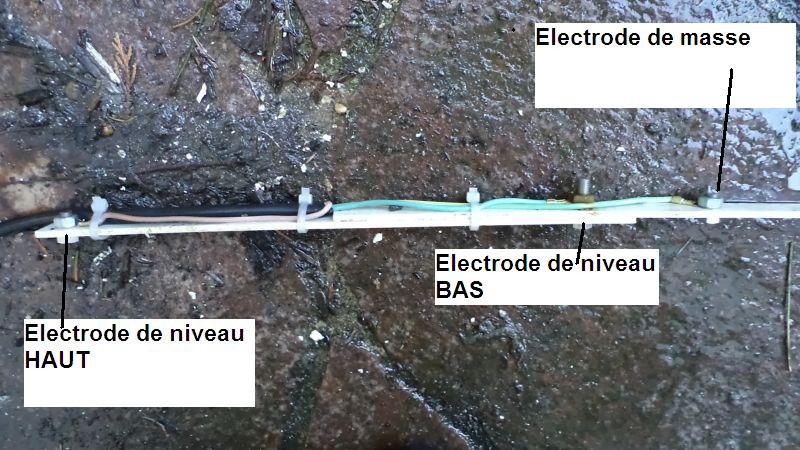
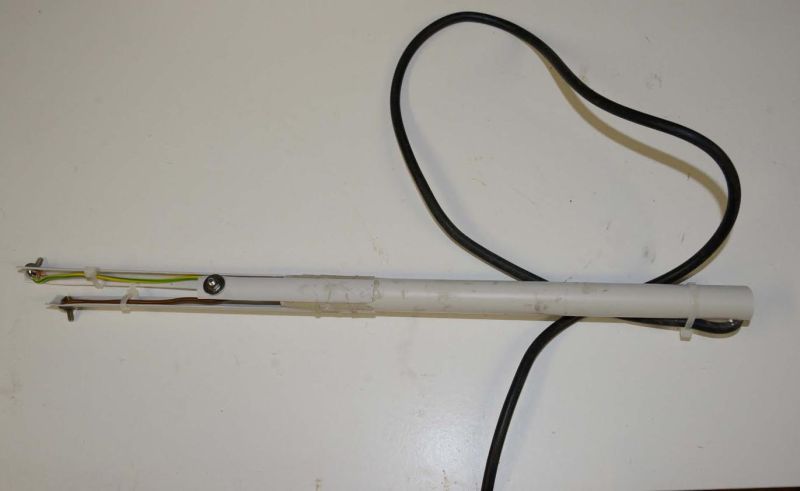
Pour détecter le niveau de l’eau dans le puisard où est immergée la pompe, on utilise une sonde comportant 3 électrodes :
— la plus basse, dite "de masse" est toujours immergée.
— environ 10cm au dessus ( à voir selon la pompe) on trouve l’électrode de niveau BAS, c’est à dire le niveau en dessous duquel la pompe doit s’arrêter de pomper.
— enfin au niveau HAUT (ici 25 cm au dessus du niveau BAS) c’est l’électrode qui commande la mise en marche de la pompe lorsqu’elle est immergée.
Ces 3 électrodes sont constituées de boulons M6 en inox de préférence, vissées sur un support isolant quelconque, ici un morceau de plastique.
Par souci de fiabilité maximale , on a connecté deux relais en parallèle : si les contacts de l’un des deux se détériorent (le démarrage d’un moteur de 800W est assez stressant pour des contacts de relais), le deuxième assurera le fonctionnement. D’autre part, un condensateur de 100nF/400V est connecté aux bornes des contacts pour aider à absorber l’éventuelle étincelle.
La séquence de fonctionnement est la suivante :
tant que l’électrode Haute n’est pas noyée, la pompe est arrêtée.
Quand le niveau d’eau atteint cette électrode, la pompe est activée et le reste jusqu’au moment où le niveau d’eau descend sous l’électrode du BAS : elle s’arrête alors.
L’eau dans le tuyau au dessus de la pompe va redescendre et noyer de nouveau l’électrode basse mais ceci est ignoré par l’électronique qui attend l’immersion de l’électrode haute pour redémarrer.
Cette fonction retard entre les niveau haut et bas s’appelle l’hystérésis du système.
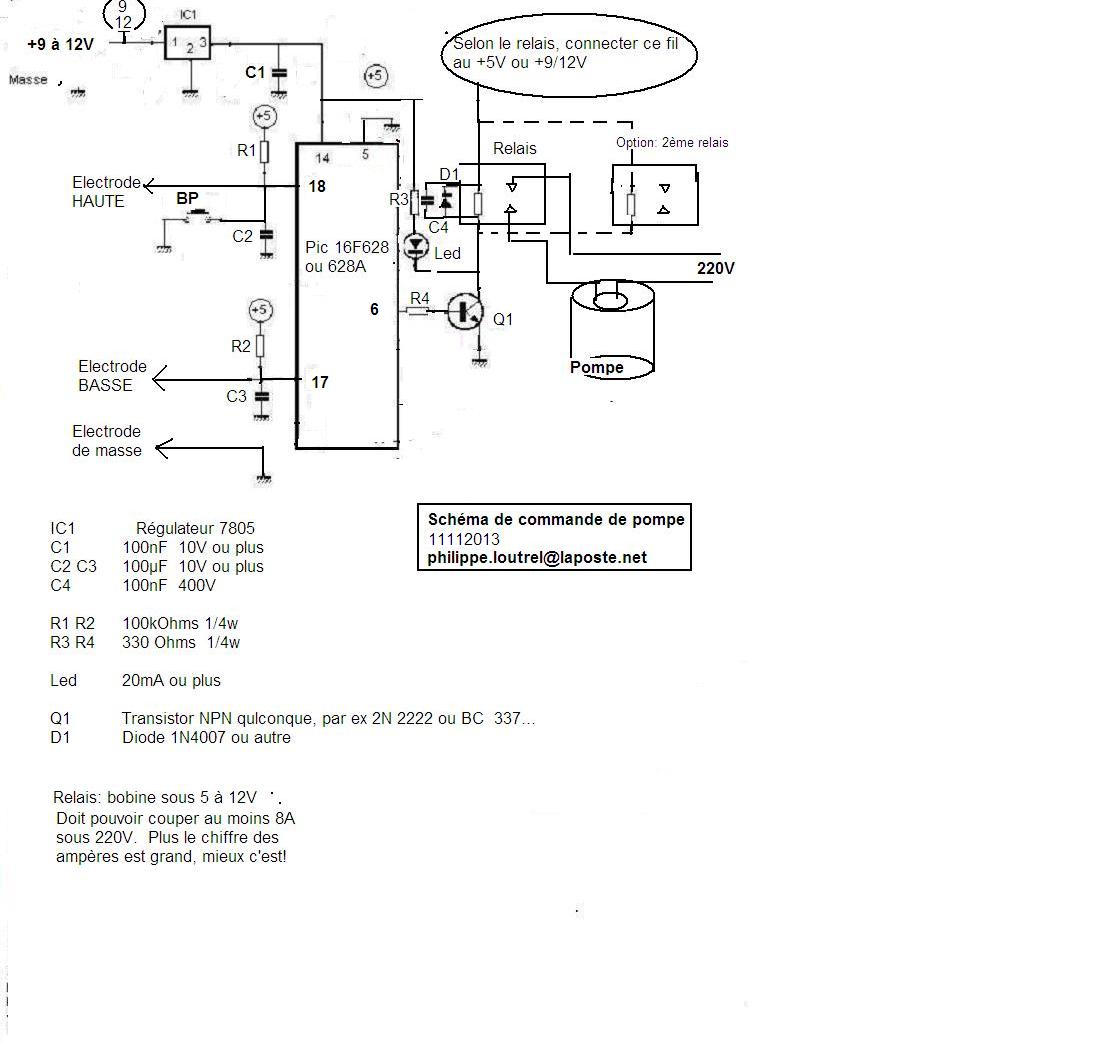
Le Pic scrute en permanence les deux entrées Haut et Bas : une électrode à l’air libre donne une entrée à 5V, via R1 ou R2. Dès que l’eau atteint une électrode, la résistance de l’eau est très faible par rapport à R1 ou R2 (100 000 Ohms), donc l’entrée passe à quasi 0 volt.
La commande de la pompe se fait via le transistor Q1 qui alimente la bobine du relais (D1 protège Q1 des surtensions selfiques de la bobine). Quand le relais est collé, la LED s’éclaire.
Le Bouton Poussoir sert à forcer la mise en marche de la pompe pour vérifier son fonctionnement par exemple.
On notera que ce modèle de PIC permet de se passer de quartz (et ses deux capas) ainsi que de résistance de RAZ. Le nombre de composants est réduit au minimum.

|
Logiciel POMPE111113 à décompacter
|
Il y a 2 fichiers :
— le fichier .hex, à programmer dans le PIC.
— le fichier .asm , programme source en assembleur à titre de documentation pour les curieux, modifiable bien sur. A ouvrir avec tout éditeur de texte : Bloc note, Word, etc
Une réalisation en double, par Alain, avec un seul relais par boitier


Bonjour, je n’ai pas encore essayé votre montage qui me parait simple et efficace, j’aurais juste une question : les électrodes sont connectées au +5v par 100kohm et à la masse par 100microfarad , ça me parait beaucoup , ça ne crée pas une tempo à l’arrêt de la pompe ? ce ne serait pas 100nano F ?
de toutes façons je vais essayer ;)
merci
Bonjour "bernt16 "
non c’est bien ça, il faut cette valeur de capa pour éviter les comportements aléatoires.
Quand ça marchera envoies moi une photo pour la mettre sur le site !
Merci d’avance.
