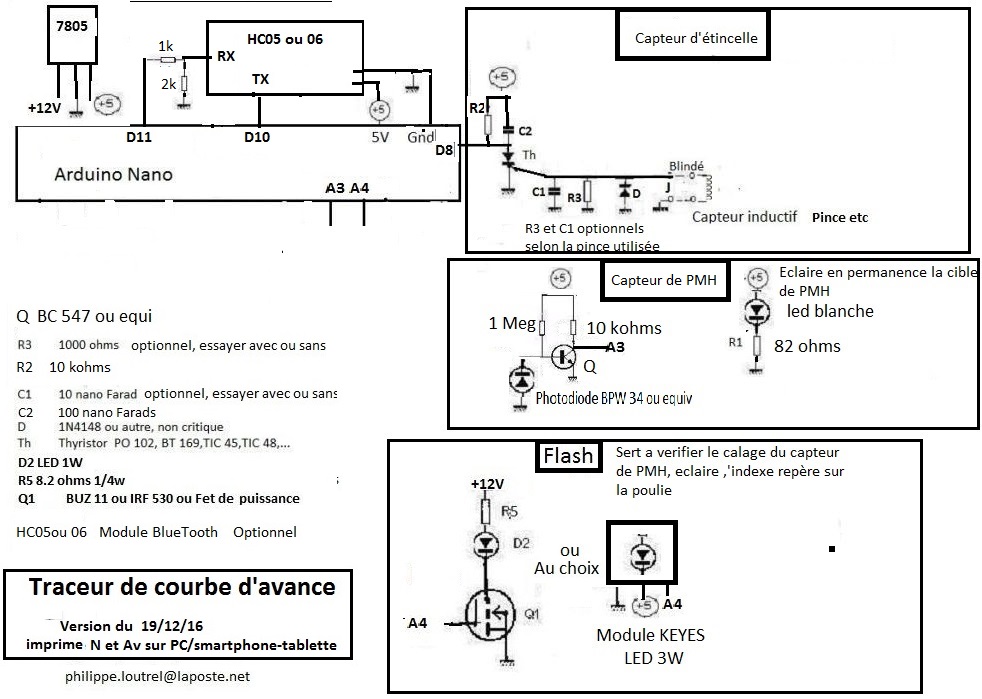
Le montage comporte deux capteurs :
— un capteur d’étincelle du cylindre N°1 : la classique pince inductive autour du fil de bougie.
— un capteur de Point Mort Haut allumage pour ce cylindre : il est composé d’une LED blanche qui illumine une cible sur la poulie de vilo (ou volant moteur) et d’une photodiode qui détecte l’arrivée de la cible.
Ce capteur permet de mesurer T (en microsecondes), temps écoulé entre 2 passages de la cible, d’où le regime N t/mn = 60 000 000 /T.
L’arrivée d’une étincelle démarre un chronomètre qui s’arrête lorsque la cible de PMH est détectée.
Si D est ce délai mesuré (en microsecondes ), à ce temps D correspond un nombre de degrés Av calculé par une simple règle de 3 :
Av = (360/T)*D
Le couple N et Av est émis sur la liaison série vers le moniteur du PC (sous IDE Arduino) pour affichage et aussi vers le module BlueTooth HC05(ou 06) qui transmet ces mêmes valeurs pour affichage sur un smartphone( ou tablette) sous Androïd.
Toute Application du genre Terminal convient mais il est recommandé de choisir :
Blue Term + (Michael Jentsch)
Mise en place du capteur de PMH
C’est le point un peu délicat l’objectif étant de s’assurer que l’ensemble cible-capteur déclenche exactement au moment du passage du piston N°1 au PMH allumage.
On localise tout d’abord le repère sur la poulie puis en faisant tourner le moteur on l’aligne sur le repère fixe ( en general sur le carter moteur).Ne pas confondre ce repère de PMH avec un éventuel autre repère, d’avance statique, qui serait situé quelques millimètres AVANT le repère de PMH dans le sens de rotation du moteur.
On peut alors fixer le capteur de PMH à 3-5 mm de la poulie et à l’aplomb du capteur on colle un 1 cm de Scotch noir sur la poulie, ce sera la cible.
On démarre le moteur et avec le module de flash ( qui fonctionne alors en stroboscope, émettant un flash au moment de la detection de la cible) on vérifie que les repères de PMH sont bien alignés. Si nécessaire, on décale le capteur (ou la cible) pour obtenir cet alignement.
